使用树莓派原装CSI摄像头录制视频并利用灰度重心法获取重心,将图像和重心数据通过Socket实时传输到电脑上
因为需要实现程序一启动便打开摄像头计算数据,同时启动Socket服务器等待客户端连接,所以利用C++11中的thread库通过多线程实现程序
树莓派-服务端
#include <iostream>
#include <unistd.h>
#include <cstring>
#include <string>
#include <sys/types.h>
#include <sys/socket.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include <thread>
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
#define USEPORT 1234
#define T 20
Mat FRAME;
Point PCENTER;
//灰度重心法函数
Point gray_center(Mat& img)
{
Mat img_gray;
cvtColor(img, img_gray, COLOR_BGR2GRAY, 0);
Point Center;
double sumval = 0;
MatIterator_<uchar> it, end;
for (int i = 0; i < img_gray.cols; i++)
{
for (int j = 0; j < img_gray.rows; j++)
{
double s = img_gray.at<uchar>(j, i);
if (s < T)
s = 0;
sumval += s;
}
}
Center.x = Center.y = 0;
double x = 0, y = 0;
for (int i = 0; i < img_gray.cols; i++)
{
for (int j = 0; j < img_gray.rows; j++)
{
double s = img_gray.at<uchar>(j, i);
if (s < T)
s = 0;
x += i * s / sumval;
y += j * s / sumval;
}
}
Center.x = cvRound(x);
Center.y = cvRound(y);
return Center;
}
//摄像头图像处理
void cam_stand_by()
{
VideoCapture capture;
if (!capture.isOpened())
{
cout << "fail to open camera!" << endl;
exit(-1);
}
while (1)
{
capture >> FRAME;
PCENTER = gray_center(FRAME);
if (waitKey(30) >= 0)
break;
}
}
int main()
{
//开启一个线程,并将其分离,使不阻塞主程序
thread cam_th(cam_stand_by);
cam_th.detach();
//启动服务端
int serverSock = socket(AF_INET, SOCK_STREAM, 0);
if (serverSock < 0)
{
cout << "socket creation failed" << endl;
exit(-1);
}
cout << "socket creation successfully" << endl;
struct sockaddr_in serverAddr;
memset(&serverAddr, 0, sizeof(serverAddr));
serverAddr.sin_family = AF_INET;
serverAddr.sin_port = htons(USEPORT);
serverAddr.sin_addr.s_addr = htonl(INADDR_ANY);
if (bind(serverSock,
(struct sockaddr*)&serverAddr,
sizeof(struct sockaddr)) == -1)
{
cout << "Bind error, Port["<< USEPORT << "]" << endl;
exit(-1);
}
cout << "Bind successfully" << endl;
if (listen(serverSock, 10) == -1)
{
cout << "Listen error!" << endl;
}
cout << "Listening on port[" << USEPORT << "]" << endl;
while (1)
{
struct sockaddr clientAddr;
int size = sizeof(struct sockaddr);
int clientSock = accept(serverSock, (struct sockaddr*)&clientAddr, (socklen_t*)&size);
cout << "\n****NEW client touched****" << endl;
while (1)
{
if (send(clientSock, FRAME.data, FRAME.total()*FRAME.elemSize(), 0) < 0)
break;
send(clientSock, &PCENTER, sizeof(Point), 0);
}
cout << "\n==== CLIENT BREAK ====" << endl;
close(clientSock);
}
close(serverSock);
return 0;
}
PC-客户端
#include <iostream>
#include <string>
#include <opencv2/opencv.hpp> //包含opencv
#include <WinSock2.h> //包含WinSock2.h头文件
using namespace std;
using namespace cv;
#pragma comment(lib, "ws2_32.lib") //加载 ws2_32.dll
#pragma warning(disable:4996)
#define imgSize 640*480*3
//图像大小,由于传输三通道彩色图,所以*3
//有尝试过每次由树莓派先传输图像大小到客户端,但出现了一些问题,所以直接在这里定义宏
constexpr auto RASPI_IP = "192.168.1.119";
int main()
{
//****初始化
WSADATA wsaData;
WSAStartup(MAKEWORD(2, 2), &wsaData);
//****创建套接字
SOCKET sock = socket(PF_INET, SOCK_STREAM, 0);
//****创建sockAddr结构体
sockaddr_in sockAddr;
memset(&sockAddr, 0, sizeof(sockAddr));
sockAddr.sin_family = PF_INET;
sockAddr.sin_port = htons(1234);
sockAddr.sin_addr.s_addr = inet_addr(RASPI_IP); //树莓派的局域网IP
//****建立连接
connect(sock, (SOCKADDR*)& sockAddr, sizeof(SOCKADDR));
cout << "客户端发送链接请求" << endl;
int bytes = 0;
//****接收服务器传回的数据
while (1)
{
cout << "等待服务端发送信息.." << endl;
char* imgdata = new char[imgSize];
char* pointdata = new char[MAXBYTE];
//recv(sock, imgdata, imgSize, NULL);
//若直接使用recv接收,会有丢包情况出现,图片不完整
for (int i = 0; i < imgSize; i += bytes) //循环接收图片信息,防止没接收完
{
if ((bytes = recv(sock, imgdata + i, imgSize - i, 0)) == -1)
{
cout << "Fail to recive" << endl;
exit(-1);
}
}
recv(sock, pointdata, sizeof(Point), NULL); //接收重心Point信息
Point* tack = (Point*)pointdata;
Point center(tack->x, tack->y);
cout << tack->x << " " << tack->y << endl;
Mat img(Size(640, 480), CV_8UC3, imgdata);
circle(img, center, 6, Scalar(0, 255, 0), -1);
imshow("Gray_Center", img);
waitKey(1);
}
//关闭套接字、终止使用 DLL
closesocket(sock);
WSACleanup();
return 0;
}
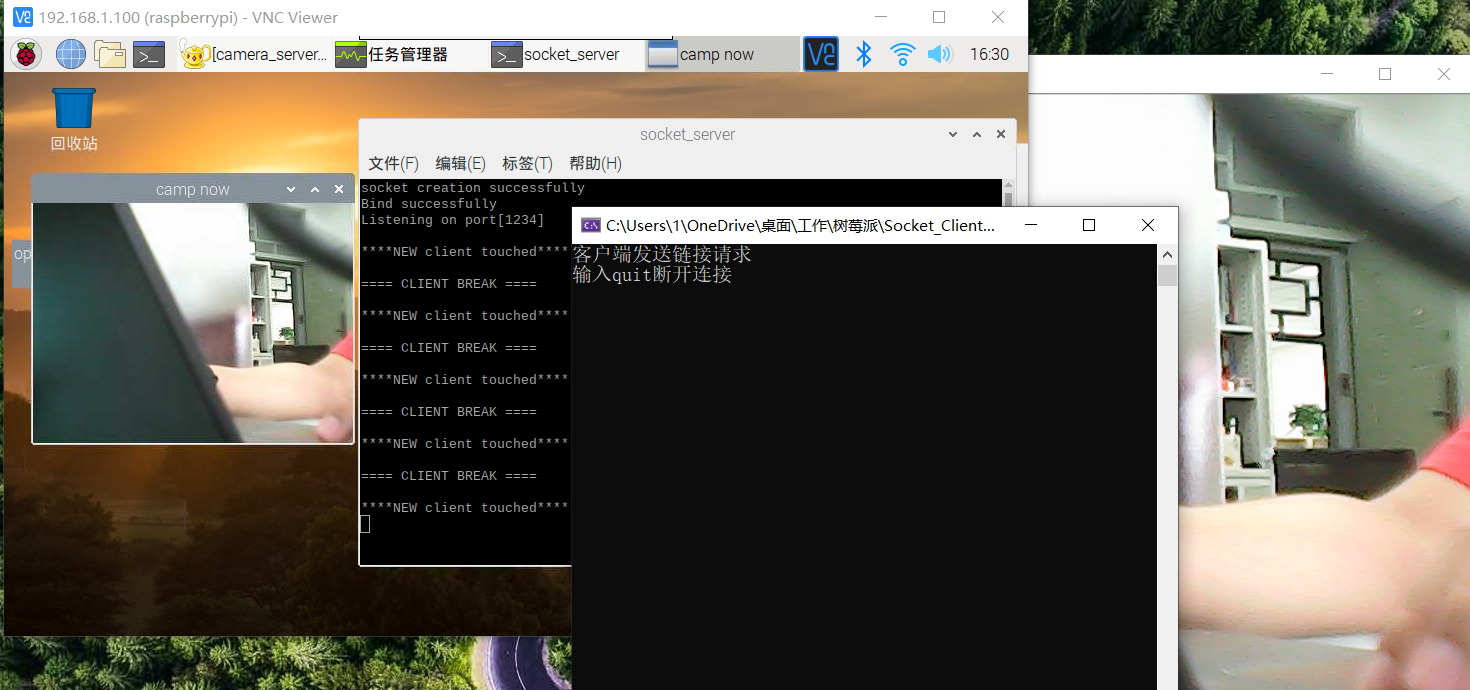
最终效果